I’m almost done with the CAN bus wiring now. I have prepared for the autopilot roll servo in the right wing, by making a loop long enough to reach the servo. Once the wing is installed, I can cut that loop and install the servo connector.
The CAN bus runs from the PFD, to the Engine Module, then to the COM radio..

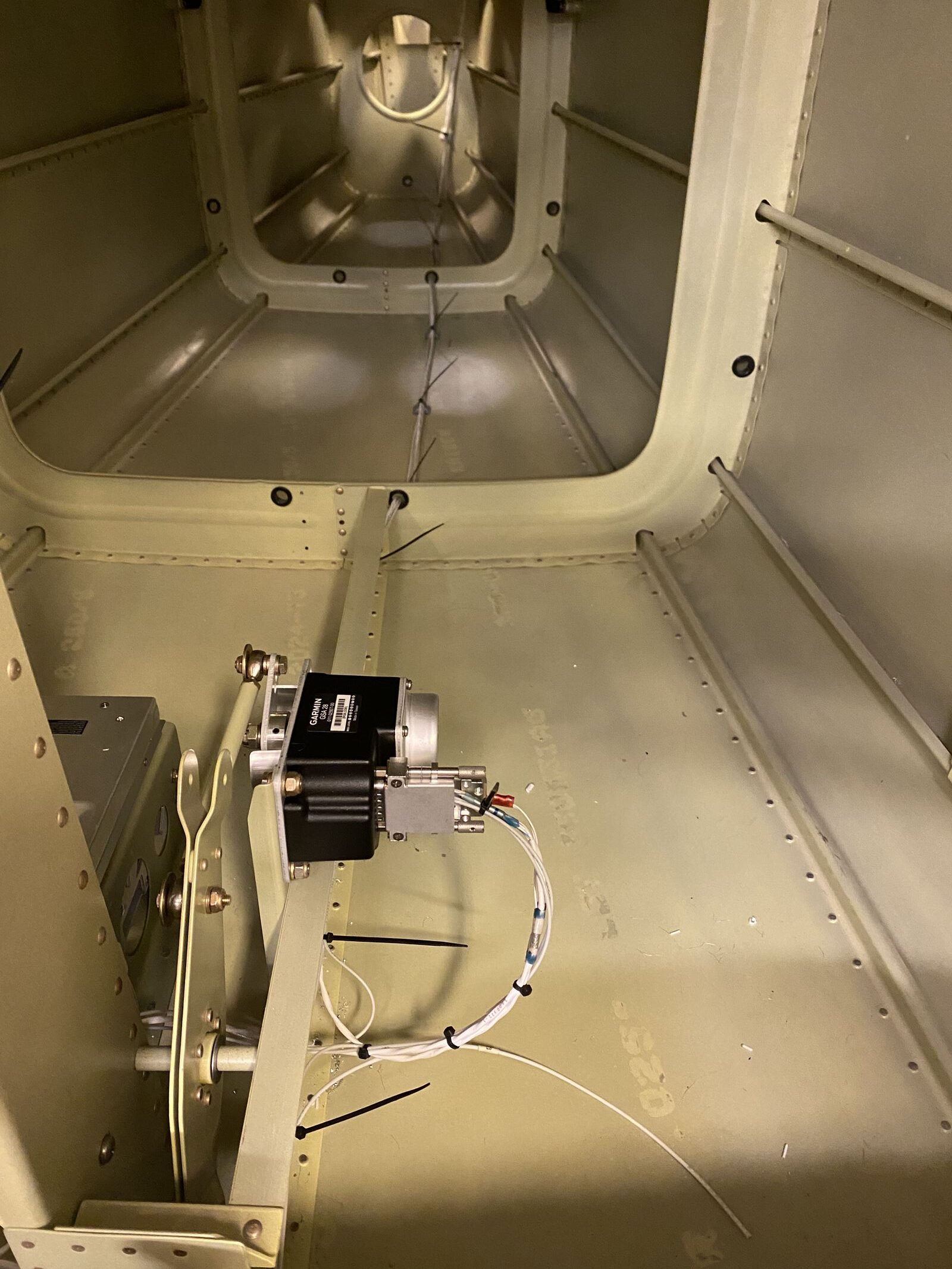
After the COM radio it runs to the autopilot pitch servo..
Then finally to the magnetometer.

With that wiring done, the PFD can now connect to all these.

Leave a Reply